
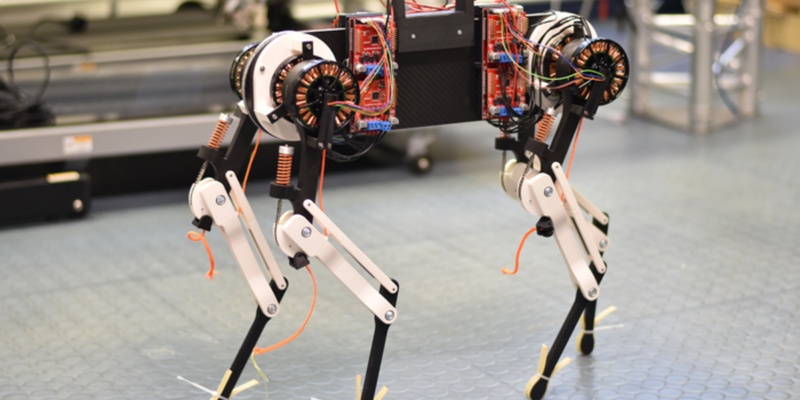
Los científicos han construido un robot de cuatro patas, del tamaño de un perro, con una “médula espinal virtual” que ha aprendido a caminar desde cero en sólo una hora, un avance que también arroja luz sobre la biología que hay detrás de la locomoción en los animales recién nacidos.
El robot cuadrúpedo Morti, descrito en la revista Nature Machine Intelligence el lunes, optimiza sus patrones de movimiento más rápidamente que un animal, aprendiendo a caminar en aproximadamente una hora, dicen los científicos.
En los animales, las redes de coordinación muscular situadas en la médula espinal les ayudan a dar los primeros pasos, pero el aprendizaje de la coordinación precisa de los músculos de las piernas y los tendones lleva cierto tiempo, afirman investigadores del Instituto Max Planck de Sistemas Inteligentes (MPI-IS) de Alemania.
Los estudios demuestran que las crías de animales dependen en gran medida de los reflejos de la médula espinal.
El robot del tamaño de un labrador tiene reflejos como los de un animal y aprende a caminar a partir de sus errores utilizando la compleja mecánica de sus patas y un algoritmo de aprendizaje, afirma Felix Ruppert, estudiante formal de doctorado en MPI-IS.
“No podemos investigar fácilmente la médula espinal de un animal vivo. Pero podemos modelar una en el robot”, dijo el coautor del estudio Alexander Badri-Sprowitz en un comunicado.
En el robot cuadrúpedo, los datos de los sensores de los pies se cotejan constantemente con los datos del objetivo de su médula espinal virtual modelada que se ejecuta como un programa en su ordenador.
Aprende a caminar comparando continuamente la información enviada y la esperada de los sensores, ejecutando bucles reflejos y adaptando sus patrones de control motor, explican los investigadores en el estudio.
El robot dispone de un generador central de patrones (CPG) que funciona de forma similar a las redes de neuronas de las médulas espinales de los animales, que producen contracciones musculares periódicas sin la intervención del cerebro.
Estas redes nerviosas ayudan a generar tareas rítmicas como caminar, parpadear o hacer la digestión en los animales.
Cuando los animales jóvenes caminan sobre una superficie perfectamente plana, dicen que estas redes de nervios pueden ser suficientes para controlar las señales de movimiento de la médula espinal, pero un pequeño bache en el suelo puede cambiar la marcha.
Es entonces cuando los reflejos entran en acción y ajustan los patrones de movimiento para evitar que el animal se caiga.
Pero en los animales recién nacidos, los investigadores dicen que estos nervios no se ajustan lo suficientemente bien al principio y los animales van dando tumbos, pero pronto aprenden cómo estos reflejos controlan los músculos y los tendones de las patas.
“Sabemos que estos CPG existen en muchos animales. Sabemos que los reflejos están incorporados; pero ¿cómo podemos combinar ambos para que los animales aprendan movimientos con reflejos y CPGs?” dijo el Dr. Badri-Sprowitz.
Los científicos afirman que el CPG de Morti -simulado en un pequeño y ligero ordenador que controla el movimiento de las patas del robot- también aprende de la misma manera.
Los datos de los sensores de los pies del robot se comparan continuamente con el toque esperado predicho por esta médula espinal virtual.
“Los datos vuelven a fluir desde los sensores a la médula espinal virtual, donde se comparan los datos de los sensores y del CPG. Si los datos de los sensores no coinciden con los esperados, el algoritmo de aprendizaje cambia el comportamiento de la marcha hasta que el robot camina bien y sin tropezar”, explicó el Sr. Ruppert.
“Cambiar la salida del CPG mientras se mantienen activos los reflejos y se controla el tropiezo del robot es una parte fundamental del proceso de aprendizaje”, añadió.
El algoritmo de aprendizaje cambia la distancia a la que las patas se balancean hacia delante y hacia atrás, la rapidez con la que se balancean y el tiempo que una pata está en el suelo cuando el perro robot tropieza, señaló el estudio.
“Nuestro robot prácticamente ‘nace’ sin saber nada de la anatomía de sus patas ni de su funcionamiento. El CPG se asemeja a una inteligencia automática incorporada para caminar que proporciona la naturaleza y que nosotros hemos transferido al robot”, añadió el Sr. Ruppert.
“Se trata de una investigación fundamental en la intersección entre la robótica y la biología. El modelo robótico nos da respuestas a preguntas que la biología por sí sola no puede responder”, añadió el Dr. Badri-Sprowitz.




Comments